

Nawigacja lotnicza
Prowadzenie nawigacji lotniczej – latanie po meblach, nawigacja zliczeniowa, w oparciu o punkty charakterystyczne terenu, radionawigacja, nawigacja obszarowa i zanikająca astronawigacja. Jak latać samolotem i nie zgubić się?
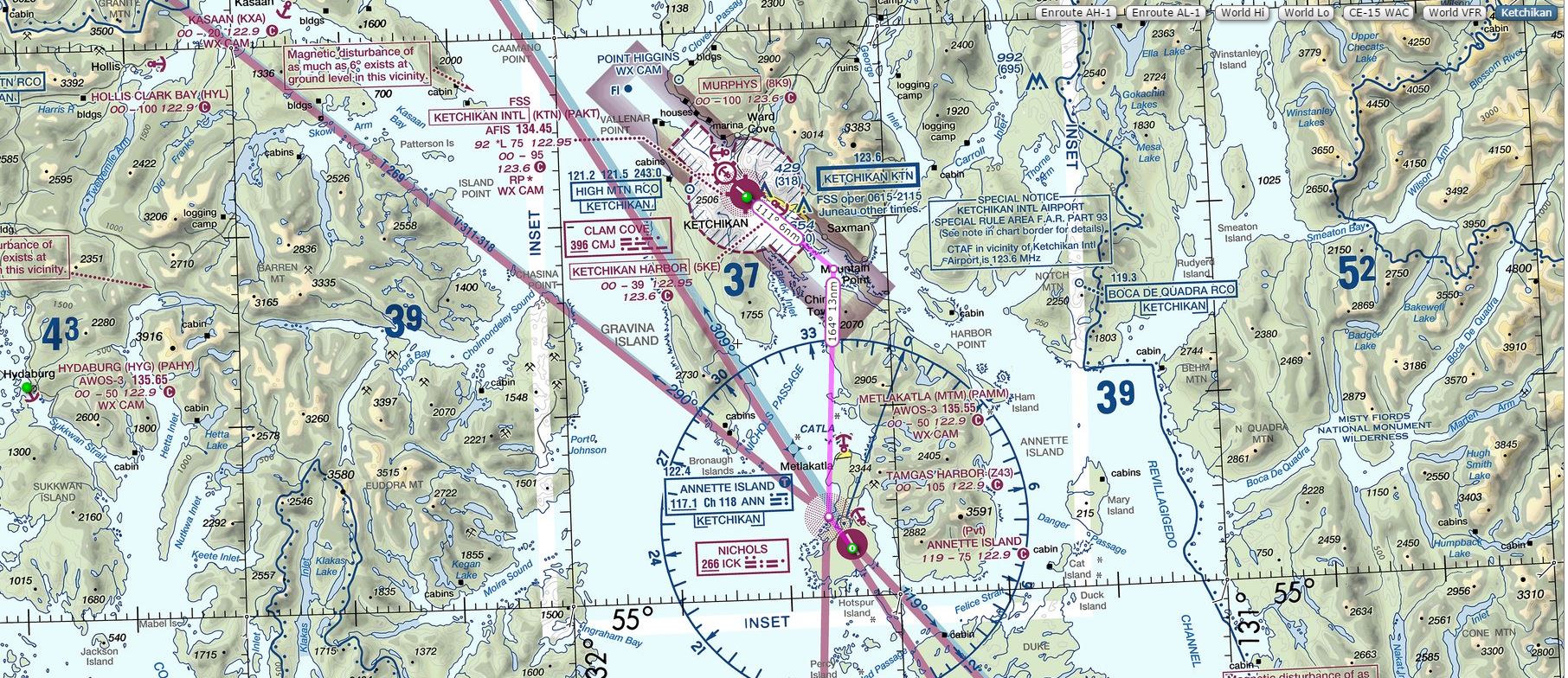
Amerykańska mapa VFR – Sectional Chart w serwisie Skyvector
Latanie „po meblach”
„Po meblach” czyli z widocznością ziemi i punktów charakterystycznych, według których latamy. To loty na ogół w okolicy lotniska, w których bardziej niż kursem zajmujemy się tym, by lecieć w kierunku znanych obiektów – lasu, skrzyżowania, cmentarza, centrum handlowego lub elektrowni. Od tego realny pilot zaczyna pozostając w strefie lotniska, na którym się szkoli. Niestety ten etap większość początkujących pilotów wirtualnych omija. Brak scenerii, w której mogliby latać kierując się charakterystycznymi obiektami wokół lotniska skutecznie od takich lotów odstrasza.
Jeśli już masz odpowiednią scenerię – warto poćwiczyć takie latanie! To mogą być loty nad Warszawą, np. krąg EPBC lub przeloty po warszawskich trasach VFR – jeśli dysponujesz scenerią Warszawy Drzewiecki Design. To mogą być loty nad (gorąco przeze mnie polecaną) Tasmanią z darmowego demo FTX Australia. Takim lotem na dobrą sprawę był mój lot wokół Storm Bay, który opisałem w poradniku – praktycznie nad każdym punktem nawigacyjnym widziałem już następny, na który miałem się kierować.
Zachęcam do uczenia się takiej nawigacji w symulatorach, bo wyrabia ona nawyk wyglądania przez okno. Jeśli uczysz się latać cessną i obserwujesz przede wszystkim instrumenty i GPSa – trudno będzie później nauczyć się odnajdywać punkty nawigacyjne w dłuższych przelotach. Trudno będzie też nauczyć się właściwego poruszania w przestrzeni lotniska.
Nawigacja zliczeniowa – dead reckoning
To co tygrysy lubią najbardziej. Polska nazwa jest taka formalna. Angielska oddaje sens – albo zliczysz albo… Przyjęło się „dead” ale termin pochodzi prawdopodobnie od zniekształconego ded(uced) reckoning.
W nawigacji zliczeniowej pozycję odgadujemy z wyliczenia pozycji za pomocą dostępnych danych – kursu i prędkości samolotu oraz kierunku i siły wiatru. Dobrze przeprowadzona pozwala wyprowadzić samolot po kilku godzinach lotu nad oceanem na maleńką wysepkę. Źle prowadzona – kończy się jak ostatni lot Amelii Earhart (dodajmy, że Noonan prawdopodobnie nienajlepiej prowadził w tym locie astronawigację, a Earhart nie opanowała dobrze swojego radiokompasu).
Podstawą prowadzenia nawigacji zliczeniowej jest wyliczenie nawigacyjnego trójkąta prędkości (który jakiś czas temu opisałem na blogu w tekście wprowadzającym) oraz precyzyjne utrzymywanie kursu i prędkości. Wykonując lot z prędkością, którą zaplanowaliśmy i określonym kursem przez wyliczony czas (wszystko z uwzględnieniem poprawki na wiatr) powinniśmy osiągnąć bezbłędnie oczekiwaną pozycję.
Tę dziedzinę nawigacji w lotach wirtualnych łatwo pominąć. GPSy w symulatorze prowadzą bezbłędnie, później w lotach większymi samolotami FMC również rysuję kreskę, której można się trzymać kurczowo. Gorzej kiedy trzeba pokonać 20 czy 30 mil nad monotonnym terenem w locie, w którym szukamy jakiejś wioski – następnego punktu zwrotnego. Okazuje się, że bez treningu trudno w nią trafić.
Ze zliczenia korzystamy (albo powinniśmy korzystać) świadomie lub nieświadomie prawie w każdym locie. Nawet w kręgu lub w holdingu – wykonując lot po nakazanej linii drogi intuicyjnie wyliczamy poprawkę na znoszenie. Kiedy trzeba pokonać większy dystans – robimy to samo tylko bardziej skrupulatnie.
Oczywiście zliczenie jest obarczone błędem. Utrzymanie kursu z dokładnością do jednego stopnia na całej trasie może być niemożliwe z powodu turbulencji. Przewidywane przez pilota i uwzględniona w obliczeniach siła i kierunek wiatru mogą się zmienić w locie. Dane wejściowe mogą być już w momencie wprowadzania obarczone błędem. Dlatego z nawigacji zliczeniowej powinno się korzystać w połączeniu z innymi metodami nawigacji, a planując odcinek trasy, który pokonamy za pomocą nawigacji zliczeniowej powinniśmy uwzględnić możliwy błąd i zaplanować punkty zwrotne (kontrolne) na tyle charakterystyczne by nawet przy maksymalnym błędzie je rozpoznać.
Nauka nawigacji zliczeniowej w symulatorze jest dużo łatwiejsza niż nauka w rzeczywistości. Dla ułatwienia początkujący może zupełnie wyciszyć wiatr i zacząć od opanowania umiejętności wyliczenia czasu i kursu do celu. Pomogą zresztą w tym programy planujące lot – takie jak lecimy.org czy skyvector.com.
FSX i FS9 mają domyślnie przestarzałą bazę deklinacji magnetycznej. Aby poprawnie prowadzić nawigację w oparciu o aktualne mapy należy zaktualizować deklinację magnetyczną symulatora.
Nawigacja w oparciu o punkty charakterystyczne terenu
To na dobrą sprawę nawigacja zliczeniowa, w której punkty zwrotne / kontrolne są obiektami na ziemi – miastem, szczytem górskim, mostem, jeziorem, skrzyżowaniem.
Planując trasę – wybieramy kolejne punkty charakterystyczne, które rozpoznamy z powietrza, a między nimi wytyczamy odcinki lotu po prostej. Punkty na ziemi – w momencie kiedy je mijamy – nie tylko potwierdzają naszą pozycję, ale pomagają również wprowadzić poprawkę do zliczenia, które przygotowaliśmy. Z czasu osiągnięcia punktu i z odległości w jakiej od punktu przelatujemy możemy wyciągnąć wnioski na temat wiatru i wprowadzić poprawkę przed następnym odcinkiem.
Lot w oparciu o punkty charakterystyczne terenu wykonałem z Łodzi do Gdańska opisując go na blogu („Z Łodzi do Gdańska VFR”).
Radionawigacja
Czyli metoda prowadzenia nawigacji wykorzystująca radiowe pomoce nawigacyjne. Choć mnie bardzo kusi – pominę wtręt historyczny i zajmę się systemami i technikami używanymi obecnie na świecie.
VOR-to-VOR
Loty od radiolatarni do radiolatarni, w których samolot pozostaje (niemal) przez cały czas w zasięgu sygnału jednej z nich. Wbrew nazwie – nie muszą to być radiolatarnie VOR – zamiast nich mogą być to radiolatarnie bezkierunkowe NDB, a w lotach (przede wszystkim) wojskowych – radiolatarnie TACAN czy rosyjskie RSBN.
VOR-to-VOR to pojęcie obecnie kojarzone z USA gdzie do dziś zachowała się siatka dróg lotniczych opartych ściśle o pomoce nawigacyjne. Korzystając z amerykańskich map możecie zaplanować przelot z jednego końca USA na drugi i będziecie w zasięgu radiolatarni. Korzystanie z amerykańskich map i informację gdzie te mapy znaleźć zawarłem w tekście „Czytanie map” poświęconym Stanom Zjednoczonym.
Wbrew intuicji początkujących (wniosek o intuicji wyprowadzony z lektury forum i pytań wysyłanych mailem) – VOR-to-VOR nie oznacza, że każdy punkt zwrotny będzie położony nad radiolatarnią. Drogi lotnicze mogą się w takim locie krzyżować na przecięciu radiali dwóch radiolatarni.
NON-RNAV
„NON-RNAV” w sieci Vatsim opisuje wirtualne loty prowadzone w przestrzeni i po drogach RNAV (do tego dojdę), które wykonywane są za pomocą klasycznych pomocy nawigacyjnych. Jedni taką formę nawigowania traktują jako ciekawe urozmaicenie lub element szkolenia, inni jako ułatwienie (nie trzeba się uczyć obsługi FMC). Sugeruję traktować to jedynie jako technikę treningową.
Wraz z upowszechnieniem dróg lotniczych nawigacji obszarowej (RNAV) i oderwaniem ich od pomocy nawigacyjnych takie planowanie lotów staje się coraz trudniejsze a miejscami niemożliwe (nad Szwecją już lata temu było bardzo mało dróg, które można by pokonać lecąc po radialu jakiejś pomocy nawigacyjnej). W Polsce jeszcze sporo takich dróg pozostało, ale ich liczba sukcesywnie maleje. Należy to wziąć pod uwagę przed ewentualnym lotem online.
Inne techniki radionawigacyjne
Radionawigacja to nie tylko VOR-to-VOR. Latając można wykorzystać pomoce nawigacyjne do wyznaczenia pozycji samolotu jako zamiennik lub uzupełnienie punktów charakterystycznych terenu. W takim wypadku nie będziemy ograniczeni radialami rozpiętymi między pomocami nawigacyjnymi i nawigując zliczeniowo możemy przelecieć przez pół polski w odpowiednich miejscach potwierdzając swoją pozycję.
Jak potwierdzić lub wyznaczyć pozycję z jednej lub dwóch pomocy nawigacyjnych pisałem w tych tekstach:
- Radionawigacja cz. 1 – radiowe pomoce nawigacyjne
- Radionawigacja cz. 2 – NDB w nawigacji po trasie
- Radionawigacja cz. 3 – VOR i VOR/DME na trasie
Techniki nawigacyjne opisałem najszerzej w tekście o NDB (dlatego go pogrubiłem). Tam również wspomniałem o tym jak można radionawigację wykorzystać do tworzenia punktów zwrotnych opartych o „mniej” charakterystyczne punkty terenu – łącząc dwie metody prowadzenia nawigacji.
Radionawigacja na podejściach do lądowania
Oprzyrządowane podejścia do lądowania korzystają z radiowych pomocy nawigacyjnych do naprowadzania samolotu na pas. Chociażby dlatego warto uczyć się radionawigacji, bo dzięki temu podejście ILS, czy podejście VOR stanie się zrozumiałe.
Radionawigacja w symulatorze
FSX i FS9 mają domyślnie przestarzałe bazy nawigacyjne, więc oprócz wspomnianej wcześniej aktualizacji deklinacji, należy również wykonać aktualizację pomocy nawigacyjnych. Można o niej przeczytać w linkowanym już wcześniej tekście – Deklinacja magnetyczna w FSX – problemy i rozwiązania.
Nawigacja obszarowa – RNAV
Krok do przodu w stosunku do klasycznej radionawigacji, choć urządzenia pozostają (w części) takie same. Tłumacząc obrazowo – nawigacja obszarowa to wyznaczanie pozycji nad lądem na obszarze, na którym są odpowiednie pomoce nawigacyjne (VOR/DME lub co najmniej dwa DME) a nad oceanem za pomocą systemów nawigacji inercyjnej lub satelitarnej.
Komputer (w FMC lub w odpowiednim GPSie) na pokładzie samolotu, zbierając odebrane sygnały wyznacza pozycję i pomaga prowadzić samolot do następnego punktu nawigacyjnego.
B-RNAV / RNAV-5
Większość dróg lotniczych RNAV wyznaczono w standardzie B-RNAV (Basic RNAV) lub RNAV-5 co oznacza, że wymagana precyzja wykonywania trasy to +/- 5 mil od osi drogi lotniczej (przez 95% czasu lotu).
P-RNAV / RNAV-1
Precyzyjna nawigacja obszarowa wykorzystywana jest w rejonach kontrolowanych lotnisk o dużym natężeniu ruchu. Precyzja +/- jednej mili (przez 95% czasu lotu) pozwala na większe zagęszczenie ruchu.
Urządzenia RNAV
W samolotach rejsowych (bizjetach, samolotach transportowych itp – w „dużym lotnictwie”) urządzeniem służącym do prowadzenia nawigacji jest komputer FMC (system FMS). W lotnictwie „małym” odpowiednie – zaawansowane GPSy (choć nie wiem czy te systemy awioniki można jeszcze nazywać „GPSami”).
W obu przypadkach konieczne jest aktualizowanie systemu o bazę danych nawigacyjnych czyli AIRAC.
Urzadzenia RNAV w symulatorze
Niektóre dodatki (większość porządnych dodatków do FSX) posiada FMC jeśli realny odpowiednik samolotu posiada takie urządzenie. W innych przypadkach można skorzystać z darmowego vasFMC, którego instalację opisałem tutaj:
Zarówno FMC dostarczone przez wydawców takich jak PMDG, Captain Sim czy Quality Wings jak i vasFMC trzeba aktualizować tak jak ich realne odpowiedniki. Aktualną bazę AIRAC można zakupić w sklepie Navigraph i w sklepie Aerosoft.
Temat GPSów, które można w jakiś sposób uaktualniać jest mi niestety obcy – od kiedy latam po drogach lotniczych samolotami wyposażonymi w GPSa po prostu instaluję w nich vasFMC.
Nawigacja oparta o GPS
Jak nawigacja obszarowa, tylko bez tej precyzji i pewności… „Zawsze” wiemy gdzie samolot się znajduje (zawsze w cudzysłowie, bo żeglarskie profesjonalne GPSy, z którymi pływałem miały zwyczaj gubić sygnał od czasu do czasu).
W symulatorze chyba podstawowa forma prowadzenia nawigacji w ogóle, a w samolotach lekkich – na pewno podstawowa dla wielu użytkowników. W rzeczywistości zresztą coraz bardziej też.
Trochę mi szkoda, bo szczególnie w symulatorze – skoro już decydujemy się na odtwarzanie lotnictwa to pomijanie tak fajnego aspektu jak prowadzenie nawigacji, po to by zastąpić tą sztukę wpatrywaniem się w różową kreskę wydaje mi się smutne.
Astronawigacja
Wątki historyczne pomijam (pewnie pojawią się osobno – bo lubię to bardzo). Dziś astronawigacja zepchnięta jest zupełnie na margines… a właściwie w stopkę i nagłówek – czyli na bieguny. Do dziś wiele samolotów, które operują w regionach arktycznych korzysta z sekstantu jako awaryjnego przyrządu do wyznaczania pozycji w razie awarii GPSa (lepsze to niż zgubić się nad Antarktydą).
O technikach z czasów zamierzchłych pisałem tutaj – Sekstant w FSX – klasyczne instrumenty nawigacyjne cz. 1.


Dodaj komentarz
Chcesz się przyłączyć do dyskusji?Feel free to contribute!